
[ad_1]
Golfi est un robot golfeur qui utilise une caméra Kinect et un réseau de neurones pour calculer ses coups sur le green.
Les robots peuvent faire tout un tas de choses plus folles les unes que les autres. Et ce, dans tous les domaines. Des robots qui tapent dans une balle sur un fairway, ce n’est pas vraiment nouveau, mais un robot qui peut jouer tout en nuances sur un green, c’est un défi autrement plus complexe. Des chercheurs de l’Université Paderborn en Allemagne ont justement réussi à créer une telle machine, Golfi de son petit nom, qui utilise un réseau de neurones pour savoir comment placer son putt et à quelle puissance frapper la balle pour qu’elle aille dans le trou depuis n’importe où sur le green.
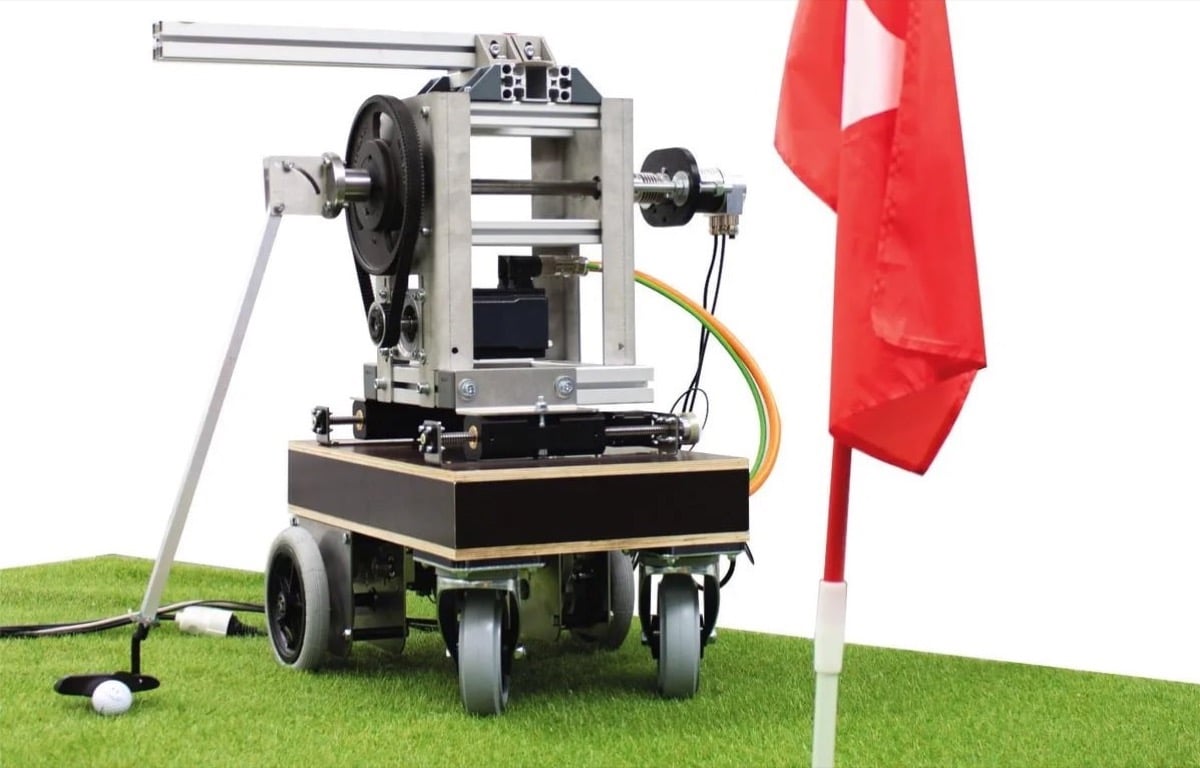
Le robot golfeur Golfi utilise une caméra Kinect et un réseau de neurones
Le robot prend une image complète du green avec une caméra 3D Microsoft Kinect et simule plusieurs milliers de coups aléatoires réalisés à des endroits différents. Il prend en compte de nombreux facteurs comme la résistance du gazon, le poids de la balle et la vitesse de départ. La doctorante Annika Junker déclarait à IEEE Research que l’entraînement de Golfi sur des trous simulés prend cinq minutes, contre 30 à 40 heures pendant lesquelles l’équipe a dû alimenter le système avec des données récupérées de coups réels.
Une fois que Golfi a déterminé le coup à réaliser, il se déplace jusqu’à la balle et utilise son équipé intégré, avec un putter évidemment, pour passer à l’action. Le robot ne met pour autant pas la balle dans le trou à chaque fois. Annika Junker explique que le robot y parvient avec une réussite comprise entre 60 et 70 %. C’est toujours mieux que la plupart des golfeurs amateurs. Et Golfi ne balancera pas son club de rage s’il rate !
pour calculer ses coups sur le green
Ceci étant dit, Golfi roule parfois sur la balle et change sa position. Les chercheurs n’ont testé leur création qu’en laboratoire, pas en conditions réelles, avec des greens qui peuvent être très différents et des terrains très subtils, ce qui pose évidemment un problème important à un système qui n’utilise qu’une vue plane.
Quoi qu’il en soit, les chercheurs de l’Université Paderborn n’avaient pas pour objectif de concevoir un robot capable de rivaliser contre les pros du PGA Tour. Ils espèrent cependant que les techniques utilisées pour Golfi pourront être réutilisées pour d’autres applications robotiques. “Vous pouvez aussi transférer cela à d’autres problèmes, dans lesquels vous auriez la connaissance du système et que vous pourriez en modéliser certaines parties pour obtenir quelques données, mais vous ne pouvez pas tout modéliser”, expliquait Niklas Fittkau, doctorant lui aussi à l’Université Paderbron et co-auteur principal de ce papier, à IEEE Research.
En 2016, un autre robot baptisé LDRIC avait réussi un trou-en-un durant un événement PGA, mais à son cinquième essai.
Source link




